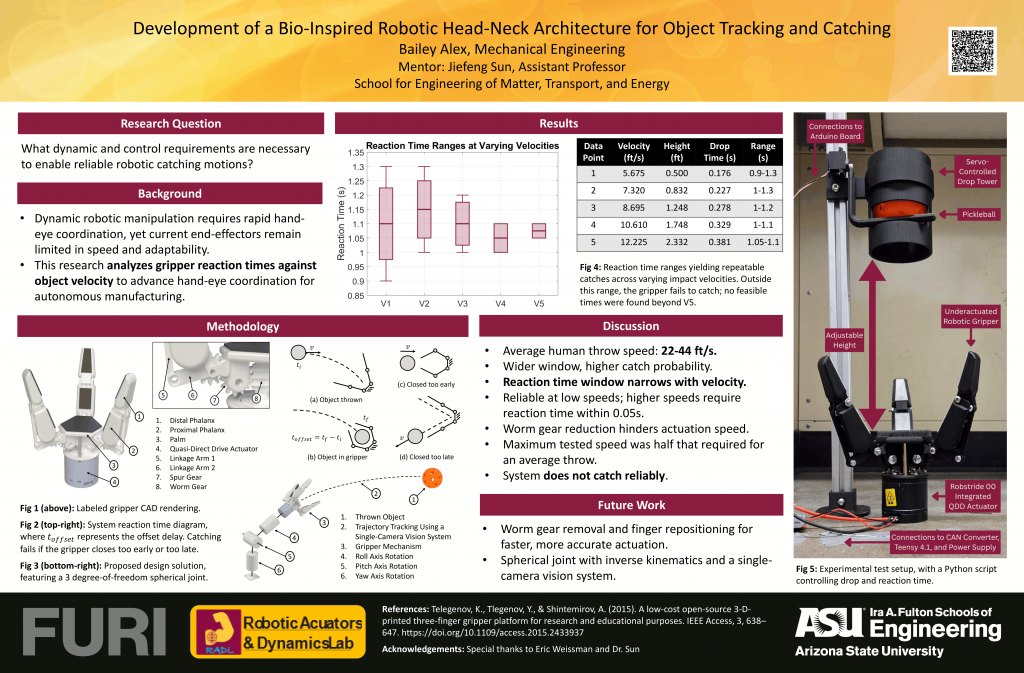
Development of a Bio-Inspired Robotic Head-Neck Architecture for Object Tracking and Catching
As the manufacturing industry expands, emerging technologies are needed to further automate production and improve efficiency. A robot’s ability to interact effectively with its environment depends strongly on the design of its mechanical arm and gripper.
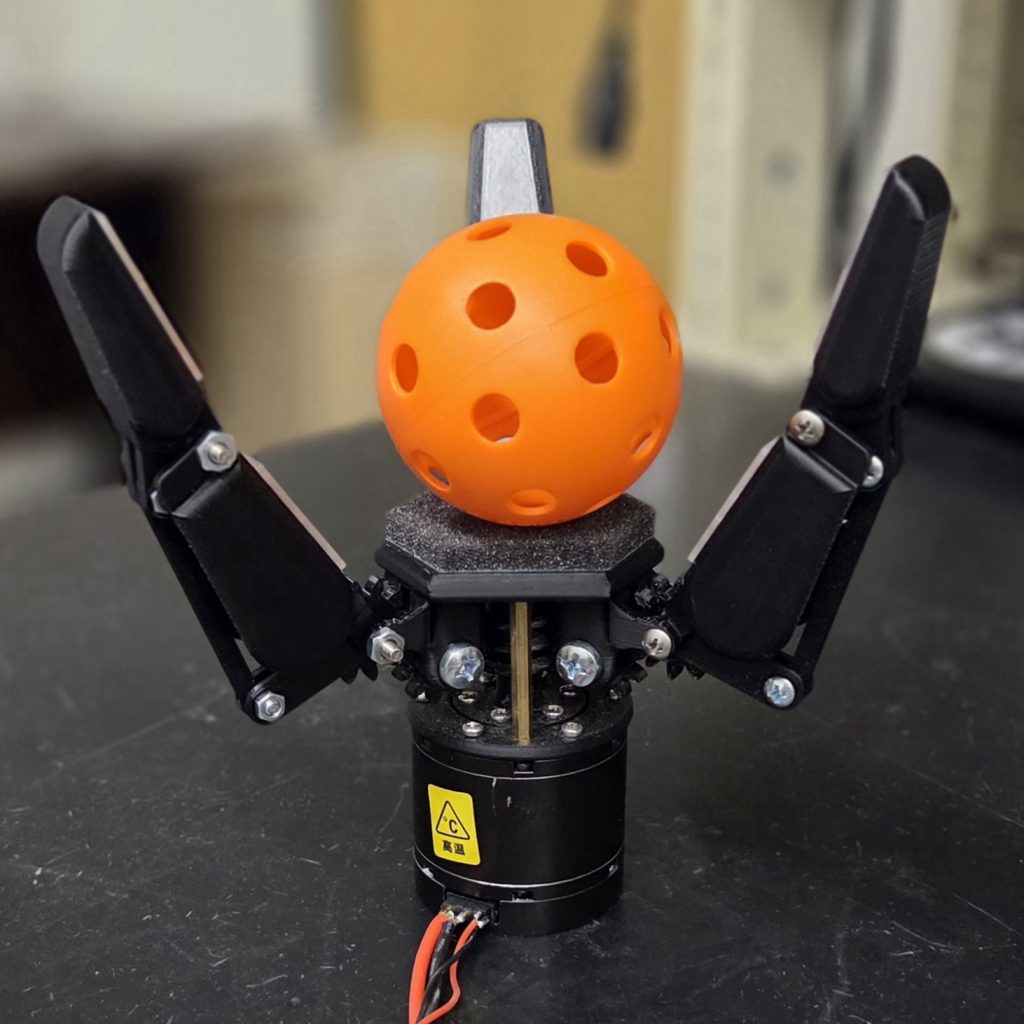
This research proposes a robotic system that integrates a three degree-of-freedom spherical joint with a gripper that links multiple finger joints to a single actuator, enabling reliable grasping and catching in environments requiring close human-robot interaction. The system promotes adaptive, responsive behavior that closely replicates human and animal motion, supporting robust hand-eye coordination in complex autonomous manufacturing tasks.
As a part of the Fulton Undergraduate Research Initiative (FURI) program and the Sun Robotics Lab during Spring 2026, I developed an underactuated robotic gripper mechanism and tested it using a drop tower to evaluate its reaction time capabilities. I then presented my findings at the semesterly Fulton Forge Student Research Expo.
FURI Poster
Gallery